
kNN/ANN#
k近邻算法全称是 k-nearest neighbors algorithm,简称kNN,最早是在1967提出的,论文DOI 是 10.1109/TIT.1967.1053964。
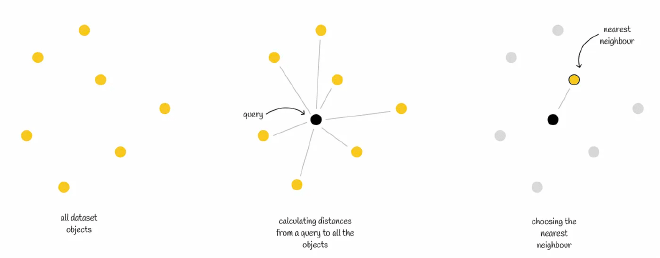
kNN算法想解决的问题如下:给定一个n维的向量数据集,和一个查询向量 Q,计算 Q 与数据集中所有向量之间的距离,然后按照距离大小,找到最接近 Q 的k个向量 (top k)。
kNN算法有三点需要注意的
- 算法超参数 k
- 距离度量
- 排序和查询 topK
kNN 算法是一种暴力搜索(brute-force),需要遍历所有数据集,大数据量情况下执行效率可想而知。于是就有了2种通过牺牲精度换取时间和空间的方式:
- 减少查询范围
- 减少向量维度
这种改进后的算法被称为 近似最近邻算法(Approximate Nearest Neighbor, ANN)。针对上面两种方式产生了两种对应的方法:
- 通过对数据集划分,减少查询范围,每个子集合中数据结构可以是树、图、倒排索引等等
- 使用量化(Quantization) 有损压缩高维向量,减少高维向量时的计算量,经常使用的是乘积量化 (Product quantization)
距离度量#
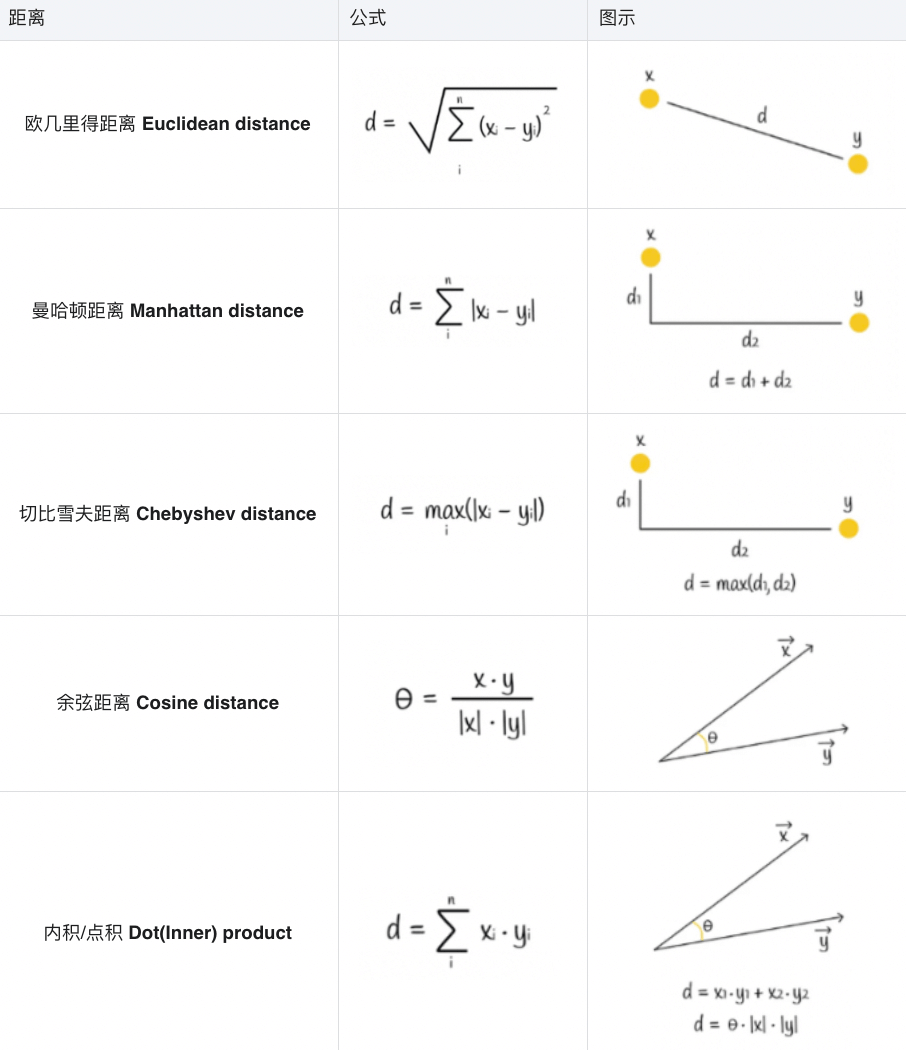
距离度量决定了向量之间的距离 (distance),很大程度上决定了空间的划分、候选节点和查询节点的距离和排序等等,这里列举5中距离的公式
向量量化 (Vector Quantization)#
矢量量化 (Vector Quantization) 可以向量压缩/编码/转换成长度更短、内存更高效的表示形式。显而易见地,这是一种有损压缩的方式,提升了ANN效率的同时牺牲了精度。但在实践中,这种精度损失是可以允许的。从数学的角度讲,是一种向量离散化的手段。
矢量量化中最有名的算法是乘积量化 (PQ, Product quantization)
乘积量化 (Product quantization)#
以乘积量化为例,首先我们会将向量分割成多个子向量(subvectors)。所有向量的子向量形成一个子空间,在子空间中进行 K-means 聚类算法,并记录在这个子空间中距离子向量最近的质心ID,所有子向量的质心ID组合起来,就是单个向量的PQ code。
量化过后,向量会被转换为n个质心ID,所以为了更有效地存储,质心ID的数量k往往是2的幂,对应的内存需要存储 \(n * log(k)\) 字节

现在我们有了量化后的 PQ code 集合,那么如何在 PQ code 集合中进行 ANN 搜索?
同样地,将查询向量分割成n个子向量,每个子向量到对应子空间中所有质心的距离,以矩阵的形式存储在 d 中,我们把矩阵 d 中每个节点称为 部分距离 (partial distances),个人感觉可以理解为相对距离。

对于数据集中的向量,我们拿到每个向量的 PQ code,在矩阵 d 中找到每个子空间中对应质心的部分(相对)距离,这样我们得到了 n 个部分(相对)距离。假设对这组部分(相对)距离使用欧几里得计算,可以大体计算出当前样本对于查询向量的相对距离,根据这个距离排序就可以得到 topK。
这种方式计算出的样本向量和查询向量之间的距离,非常接近这两个向量之间的实际距离。

数据结构#
先说一下 kNN 的算法实现,数据集的数据结构主要有两种:线性Linear 和 k维度数 K-D Tree。
- 线性 Linear 维护了一个线性数组来放所有的数据
- K-D Tree 用一个k维二叉树维护所有的数据
实现ANN算法需要分为2个维度:空间的划分 和 节点数据结构的选择。数据结构的选择比较多,有kd树、倒排索引IVF、图HNSW、哈希LSH等等,下面我们依次细说。
基于kd树的实现——以Annoy为例#
先看一下kd树的数据结构,这里参考的是 golearn/kdtree/kdtree.go
type node struct {
feature int // -1: leaf, -2: nil
value []float64 // 空间矢量,该节点代表的空间范围
srcRowNo int // 垂直于分割超平面的方向轴序号
left *node // 左子树
right *node // 右子树
}
// Tree is a kdtree.
type Tree struct {
firstDiv *node
data [][]float64 // 数据矢量
}
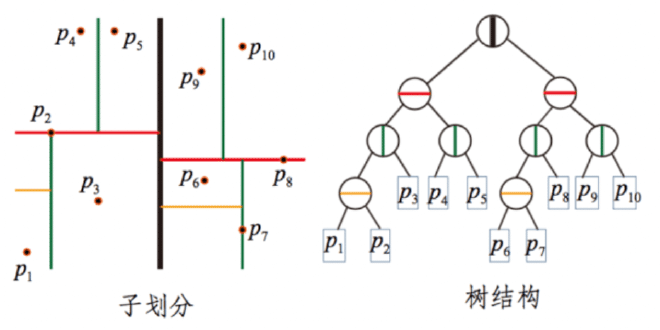
我们说到 kNN 和 ANN 的实现都可以使用kd树,ANN最大的改动点在于,是将单棵树划分为多棵树,以此提高执行效率。Annoy 正是使用了这种思路实现的 ANN 算法。
Annoy 的思路是,在整个 n 维空间中随机选取两个点,这两个点可以连成一个 n-1 维超平面 (hyperplane) ,此超平面的法向平面可以把整个空间分割为两部分。以此类推,当我随机选择N对点就有了N个法平面,可以将整个空间切分为 2N 块,直到将子空间中的样本数限制在K以内。
每一组随机拆分都可以构建一颗下图所示的树,我们依次来构建 M 组随机拆分,这样我们可以得到M个树,其中每棵树都包含了所有节点。此时我们就有了一个森林。
搜索的时候步骤如下
- 根据森林中所有树的root节点构建一个优先队列
- 找到每棵树中的k个近邻候选人
- 移出重复的候选人
- 计算去重后所有候选人和查询向量的距离
- 根据距离队候选人排序
- 返回 topK


总结一下:
- 在空间的划分方面,Annoy 会提供多组分割,每组分割构成一颗树,每棵树内会有多个根据法平面切割的子空间,保持每个子空间维持K个节点
- 每个子空间中K个节点,通过K-D Tree的方式构建
- 距离选择方面,Annoy 提供了欧几里得距离、曼哈顿距离、余弦距离、汉明距离 和 点积距离 5种
最后十分推荐阅读 Annoy 开发者之一的 Erik Bernhardsson 写的这篇文章。
Nearest neighbors and vector models – part 2 – algorithms and data structures
基于IVF倒排索引实现——以Faiss为例#
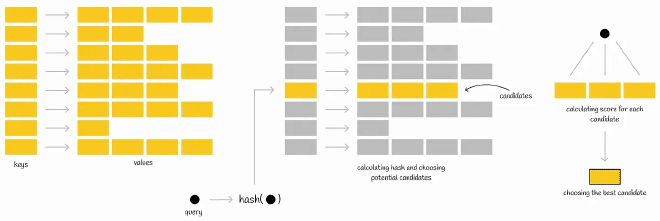
倒排索引是一种常见的索引形式,顾名思义是一个单词/数字到文档ID的KV映射,如下图。再具体执行查询时,会先通过哈希函数计算出query的值,然后从 IVF 索引的哈希表中获取对应的映射值。映射值一般都是一组数据,然后遍历这组数据查询最近topK。Faiss 在底层正是用了这种数据结构。
Faiss (Facebook AI Search Similarity) 是 Facebook 提出的一种 ANN算法。
距离度量方面,Faiss 中提供了两种实现,具体的代码在faiss/IndexFlat.h :
- IndexFlatL2:欧几里得距离的实现
- IndexFlatIP:内积(inner product)的实现
空间划分方面 Faiss 实现了K-means聚类算法:
- 随机初始k个聚类中心(也叫质心 centroids)
- 计算每个样本到质心的距离并将样本分配到最近的质心,由此组成聚类
- 然后对每个聚类中样本求平均,得到新的一组聚类质心;如果前后质心有变化,则使用新的质心组重复步骤2,无变化则下一步
- 质心不再变化时,则代表我们找到了相对优质的质心
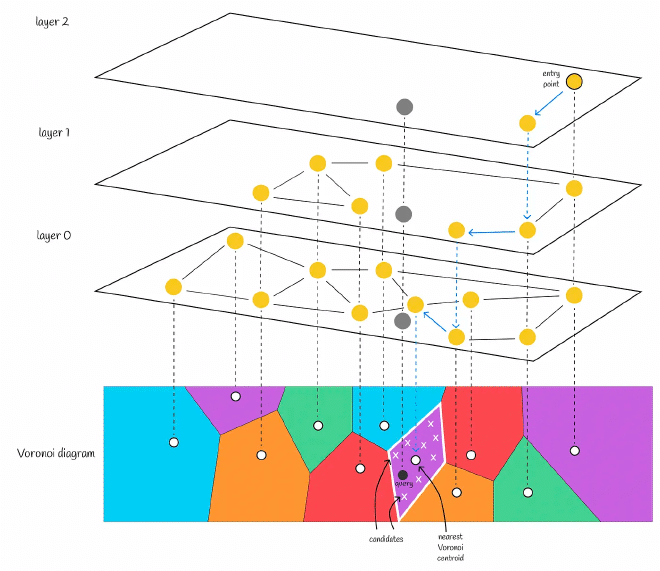
- 以这些质心和聚类所属的样本划分空间,此时我们就得到了沃罗诺伊图(Voronoi Diagram)
查询的时候,只需要找到距离查询向量最近的 nprobe 个质心,计算候选子空间内个样本和查询向量的距离并排序即可。

下面看看 IVF倒排索引方面,faiss中定义了一个头文件用来表示IVF的基础实现 faiss/IndexIVF.h,
struct Level1Quantizer {
Index* quantizer = nullptr; /// 向量-倒排列表映射的量化器
size_t nlist = 0; /// 倒排列表的数量/Voronoi单元空间的数量
}
struct IndexIVFInterface : Level1Quantizer {
size_t nprobe = 1; /// ANN查询时候的探针数量,即确定近似候选人所需的区域数
size_t max_codes = 0;
}
struct IndexIVF : Index, IndexIVFInterface {
InvertedLists* invlists = nullptr; /// 倒排列表的指针
int parallel_mode = 0; /// 是否使用 OpenMP 并行
}
倒排索引的实际内容都存储在 InvertedLists 中,具体的数据结构如下
typedef int64_t faiss_idx_t; ///< all indices are this type
typedef faiss_idx_t idx_t;
struct InvertedLists {
size_t nlist; /// 倒排索引的数量
size_t code_size; /// 每个向量的大小 code size per vector in bytes
bool use_iterator;
}
/// 倒排列表数组的实现 (默认)
struct ArrayInvertedLists : InvertedLists {
std::vector<std::vector<uint8_t>> codes;
std::vector<std::vector<idx_t>> ids;
}
IVFPQ#
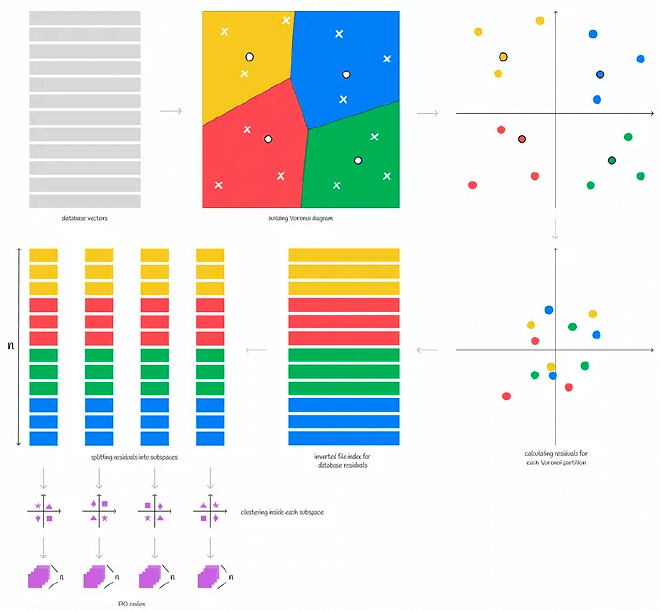
上面讲了 faiss 如何进行分区,我们再结合前面说到的 PQ 量化算法,这就有了 IVFPQ,具体的步骤如下
- 对整个向量空间,通过 K-means 找到质心(centroid)并划分为 n 个 Voronoi 单元
- 每个Voronoi单元中的样本,计算其到质心(centroid)的相对距离,即以质心作为0点得到相对向量
- 对每个Voronoi单元中样本的相对向量进行 PQ 乘积量化,即将Voronoi单元中的相对向量样本拆成子向量,对子向量空间做聚类得到质心,将向量转换成 PQ code
总结一下
- 在空间划分方面,Faiss 实现了 K-means 算法选出质心,并使用了主成分分析(PCA, Principal components analysis) 和 乘积量化(PQ, Product quantization) 对向量进行了降维和量化
- 子空间存储方面,Faiss 提供了 IVF 倒排索引、HNSW 和 LSH 3种方式,这里主要介绍了IVF
- 距离度量方面,Faiss 实现了欧几里得和内积2种距离
最后 Faiss 的文档可以看下面这个
基于HNSW图的实现——以pgvector为例#
HNSW全称是分层的可导航小世界 ( Hierarchical Navigable Small World)。
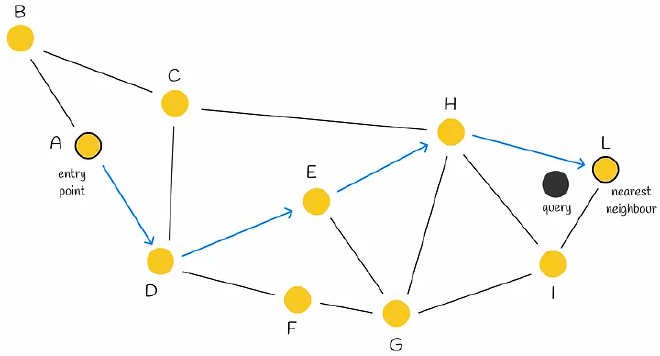
先来看 NWS 即可导航小世界,也被称为德劳内图 (Delaunay Graph):假定有个X个向量样本,每个样本需要和M个相邻样本相连,构建的过程中只需要依次求出样本距离当前图中所有节点的距离,并连接M个节点即可。
搜索的时候使用贪心算法,选择一个节点作为头结点,计算头结点及其相连节点到查询节点的距离,如果头结点最近,则当前头结点是他近邻节点,否则选择更近的节点并重复上述步骤。
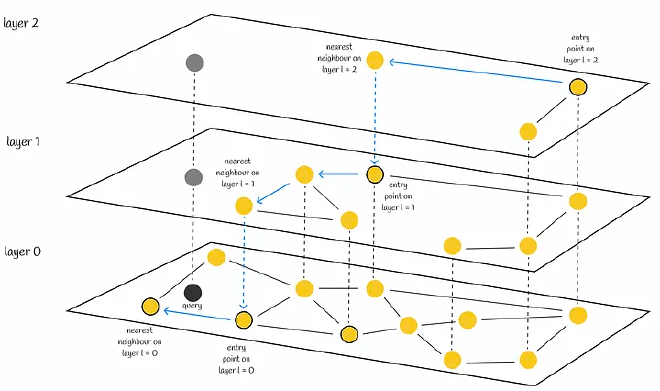
HNSW 是在 NSW 的基础上进行了分层,这种分层思想借鉴了跳表(skip-lists),唯一的区别是在于跳表是对链表进行分层,而 HNSW 是对 NSW 图进行分层。
构建 HNSW 的时候,相比构建NSW,“如何确定节点插入的层数”是HNSW最需要关注的问题。
HNSW的论文中提出了一种计算每个插入节点的level公式。其中 \(m_L\) 是归一化因子,值越大 \(l\) 就越大,代表节点在较高层上出现的概率越大;L 是最大层数。
$$ l = L - ln(unif(0..1)) *m _L $$
在查询的时候,从最上层的头结点开始,找到邻居节点中距离查询节点最近的,直到找到当前层的距离查询节点最近的节点,然后到下一层查询,以此类推,直到查询到第0层,即可找到最近邻节点。
pgvector 实现了以这种数据结构的ANN算法,pgvector 以PostgresSQL插件的方式为其提供的 ANN 近似查询的能力,先来看代码中定义的数据结构
// 向量
typedef struct Vector
{
int32 vl_len_; /* varlena header (do not touch directly!) */
int16 dim; /* number of dimensions */
int16 unused;
float x[FLEXIBLE_ARRAY_MEMBER];
} Vector;
// 节点
typedef struct HnswElementData
{
List *heaptids;
uint8 level; // 层数
HnswNeighborArray *neighbors; // 近邻节点数组
BlockNumber blkno; // 块号
OffsetNumber offno; // 补偿号
Vector *vec; // 向量
} HnswElementData;
typedef struct HnswMetaPageData
{
uint32 magicNumber;
uint32 version; // 版本
uint32 dimensions; // 维度
uint16 m; //
uint16 efConstruction;
BlockNumber entryBlkno; // 入口块号
OffsetNumber entryOffno; // 入口offset
int16 entryLevel; // 入口层数
BlockNumber insertPage;
} HnswMetaPageData;
typedef HnswMetaPageData * HnswMetaPage;
其次我们看看 pgvector 中如何给节点分配层数
#define HNSW_DEFAULT_M 16
// 最佳 ML 值
#define HnswGetMl(m) (1 / log(m))
// 计算最大层数
#define HnswGetMaxLevel(m) Min(((BLCKSZ - MAXALIGN(SizeOfPageHeaderData) - MAXALIGN(sizeof(HnswPageOpaqueData)) - offsetof(HnswNeighborTupleData, indextids) - sizeof(ItemIdData)) / (sizeof(ItemPointerData)) / m) - 2, 255)
// 随机数,介于0-1之间
#if PG_VERSION_NUM >= 150000
#define RandomDouble() pg_prng_double(&pg_global_prng_state)
#else
#define RandomDouble() (((double) random()) / MAX_RANDOM_VALUE)
#endif
/*
* 每个节点上层的最大连接数
*/
int HnswGetM(Relation index)
{
HnswOptions *opts = (HnswOptions *) index->rd_options;
if (opts)
return opts->m;
return HNSW_DEFAULT_M;
}
// 初始化节点
HnswInitElement(ItemPointer heaptid, int m, double ml, int maxLevel)
{
HnswElement element = palloc(sizeof(HnswElementData));
// 计算层数
int level = (int) (-log(RandomDouble()) * ml);
if (level > maxLevel)
level = maxLevel;
element->level = level;
...
}
pgvector最早还实现了基于IVF的 ANN实现,这部分就不详细展开。
IVF-HNSW#
在2018年的论文 Revisiting the Inverted Indices for Billion-Scale Approximate Nearest Neighbors 提出了一种 HNSW + IVF 的方法,并称可以处理亿级向量数据的ANN查询。核心的点主要有以下几点:
- 使用 HNSW 对数据集进行空间划分,通过层次结构,将数据集划分为多个区域。HNSW中的节点对应一个质心,一个质心代表一个子空间。
- 针对每个子空间,有一个IVF索引来存储所属的所有向量
- 对IVF索引中的向量进行 PQ 编码来对向量进行量化
基于LSH哈希的实现——以FALCONN为例#
LSH全称是Local Sensitive Hashing,局部敏感哈希 。
顾名思义,是通过将数据向量转换成哈希值,从而缩小搜索范围,近邻节点意味着更容易发生碰撞。LSH算法主要包含3个步骤:
Shingling: 使用 k-gram 将文本切分成连续k个字符组成的序列,然后用one-hot算法对每个序列进行编码,完成将文本转换为向量。

MinHashing: 将 shingling得到的向量转化为”签名”(signature),这一步的主要目的是将向量转换为更小的维度(MinHashing),这种签名signature可以保留其样本的相似度。
这一步我们首先需要随机生成多个置换向量,MinHashing方法会对置换向量和样本向量进行置换,返回置换后第一个等于1的索引。如下图,我们使用1个置换向量,向量通过MinHashing之后会得到3。

接下来我们使用多个置换向量,然后得到每个向量的MinHashing后的值,对这个值做 signature 相似性 和 Jaccard 相似性,如下图:

最后我们说明一下 signature 相似性 和 Jaccard 相似性的计算方式,以 V1,V2 这对向量为例

我们可以看到,通过signature计算出的相似度大体等于Jaccard 相似度,这意味着我们可以将向量转换成 signature,然后计算他们的相似度,这比我们直接通过原始向量使用Jaccard Index 计算出的相似度效率更高!
LSH function: LSH 方法是将签名块散列到不同的存储桶中。
首先把 singature 拆分为多个相等的部分,每个部分被称为波段(bands),每个波段包含r的值。比如 singature 有9个值,按3个一组分,则有3个波段,每个波段有3个值。
然后分别对每个波段进行hash映射,映射到单独的存储桶中。如果signature被拆成n份,则代表有n个存储桶。
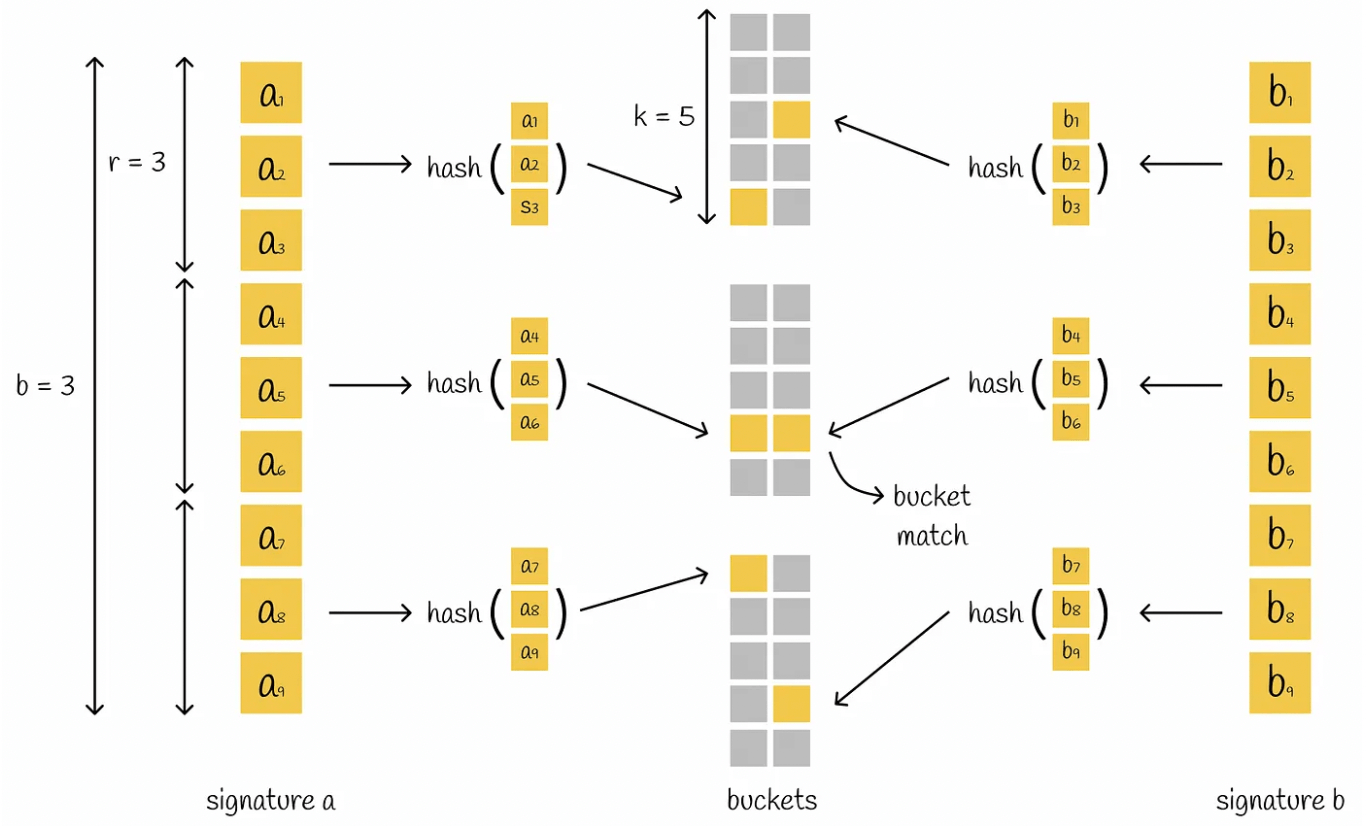
回顾一下,我们通过Shingling把文本→向量,再调用MinHashing将向量→signature签名,最后通过LSH方法对签名分段hash,并存储在不同的buckets桶中。
查询的时候我们只需要将query先转换成向量,然后计算signature签名,再对签名分片,找到对应分片的存储桶中的value,拿到里面对应的向量,和哪个向量hash冲突最多就代表它是最近近邻节点。
现在让我们再反过来思考LSH局部敏感哈希的含义,局部的意思是指 signature 分片,敏感指的是在每个分片的存储桶中的hash冲突,这就有了我们一开始包括最后所说的:signature分片hash碰撞的次数越多,代表和查询向量相似度也越高。
FALCONN 正式实现了这种LSH算法的思想,但这里暂时不再详细描述了(懒了)。 具体的项目地址是 FALCONN,项目中的wiki比较推荐看 LSH-Primer。
拓展1:ANN 基准测试#
最后推荐一个网站,对主流的大部分 ANN 算法基准测试进行了整理
拓展2:数据向量化#
前面主要介绍了我们有一个向量数据集情况下,如何查询 topk。这里简单介绍一下如何做数据向量化。
以文本向量化为例,向量化的方法有词袋模型、TF-IDF、共现矩阵、词嵌入(word embedding)等等,目前使用最多的是词嵌入,其中的算法原理可以看 NLP–文本向量化。
当前基于词嵌入(embedding)所实现的模型如下:
| 模型 | 项目/文档地址 |
|---|---|
| M3E (Moka Massive Mixed Embedding) | https://github.com/wangyuxinwhy/uniem |
| BGE (baai general embedding) | https://github.com/FlagOpen/FlagEmbedding |
| text-embedding-ada-002 | https://cloud.baidu.com/doc/WENXINWORKSHOP/s/alj562vvu |
| 文心 Embedding | https://cloud.baidu.com/doc/WENXINWORKSHOP/s/alj562vvu |
| glm text embedding | https://open.bigmodel.cn/dev/api#text_embedding |
| RoPE (rotary-embedding) | https://github.com/ZhuiyiTechnology/roformer |
| LlamaCppEmbeddings | https://github.com/ggerganov/llama.cpp/blob/master/examples/embedding/embedding.cpp |
| text2vec | https://github.com/shibing624/text2vec |
看到这里我们自然而然可以联想到,文本数据可以向量化,图像、文件、统计数据等当然也可以向量化,所以ANN也适用于这些场景。
参考#
List: Similarity Search | Curated by Vyacheslav Efimov | Medium
Nearest neighbors and vector models – part 2 – algorithms and data structures